جستجو
برای جستجو متن مورد نظر وارد کنید و Enter بزنید برای بستن Esc بزنید.
در این اموزش قصد کنترل سرعت موتور DC و تغییر گردش موتور (چپ گرد , راست گرد) را داریم.
مدار H_Bridge از چهار سوئیچ الکترونیکی تشکیل شده است که این سوئیچ ها در حالت ضربدی روشن می شوند.
دو انتخاب برای سوئیچ وجود دارد :
1 – استفاده از Bjt
2 – استفاده از ماسفت
که ما بخاطر طراحی اسان تر ماسفت (جریان عبوری از پایه های درین – سورس ماسفت تابع ولتاژ گیت – سورس می باشد, و با اعمال ولتاژ کافی به گیت بسته به توان ماسفت مورد نظر می توانیم در خروجی جریان مورد نظر خود را داشته باشیم.) ان را انتخاب می کنیم.
ولی در ترانزیستورهای BJT نیاز به طبقات اضافی برای تقویت جریان بیس ترانزیستور اصلی خود خواهیم داشت.
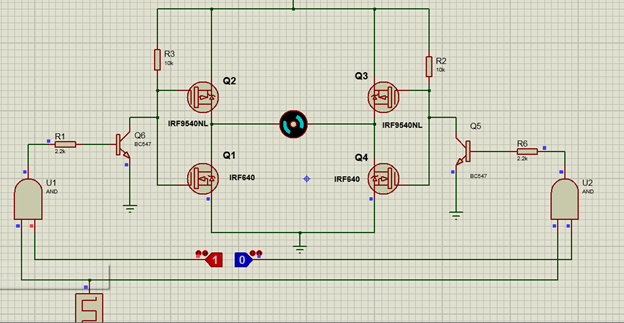
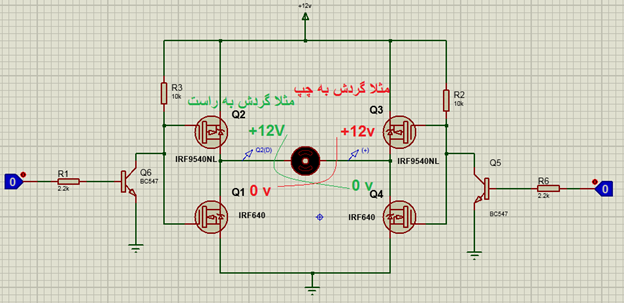
ماسفتهای Q2 و Q3 از نوع P می باشند و در حالت عادی در مدار (صفر بودن ورودیها) توسط مقاومت R3 و R2 پول اپ شده اند.
در ماسفت نوع P شرط روشن شدن ماسفت کمتر بودن ولتاژ گیت نسبت به سورس (حداقل با اختلاف 4 الی 5 ولت) می باشد.ولی در مدار ما گیت توسط مقاومت pull up ولتاژی برای با سورس دارد و در نتیجه ماسفتهای طبقه بالا خاموش هستند.
از طرفی ماسفتهای طبقه پایین از نوع N می باشند و شرط روشن شدن این ماسفتها بیشتر بودن ولتاژ گیت نسبت به سورس (حداقل با اختلاف 4 الی 5 ولت) می باشد.
چون ماسفتهای Q1 و Q4 در حالت عادی توسط مقاومت R3 و R2 ولتاژ به گیتشان می رسد روشن بوده و پایه های موتور به زمین متصل بوده و موتور در حالت خاموش قرار می گیرد.
نکته : برای راه اندازی ماسفت در جریان های بالا و کاهش تلفات سوئیچینگ باید اختلاف ولتاژ گیت – سورس به اندازه کافی باشد.(مثلا اختلاف 12 ولت مناسب است) ولی نباید این اختلاف بیشتر از 20 ولت باشد وگرنه به ماسفت اسیب وارد می شود.
اگر ما در طبقه بالایی هم از ماسفت نوع N استفاده می کردیم در خروجی شاهد افت ولتاژ خواهیم بود زیرا چه در ماسفت یا در Bjt (نوع NPN) ولتاژ پایه سورس یا امیتر از ولتاژ گیت یا بیس تامین می شود.
VE => VB – VBE
OR
VS => VG – VGS
که در ترانزیستور نوع NPN ولتاژ امیتر 0.7 کمتر از ولتاژ بیس خواهد بود و در ماسفت نیز شرایط به مراتب بدتر می باشد و حداقل ولتاژ سورس 4 الی 5 ولت کمتر از ولتاژ گیت ان خواهد بود.
برای رفع این مشکل و جلوگیری از افت ولتاژ ماسفتهای طبقه بالایی را نوع P در نظر گرفته ایم.
نکته دیگر این است که چون مدار درایو ما با ولتاژ بالا کار می کند و اتصال مستقیم پایه های بخش کنترلر (مثل استفاده از میکروکنترلر) به گیت ماسفت سبب اسیب به کنترلر (مثلا میکروکنترلر) می شود و همچنین در صورت اعمال پالس به گیت ماسفت جریان کشی دارد و ممکن است کنترلر ما نتواند جریان ان را تامین کند ما از یک ترانزیستور با ارایش امیتر مشترک استفاده کرده ایم تا بخش کنترلر از بخش قدرت ایزوله شود.تا در صورت خرابی ماسفت نیز بخش کنترلر از اسیب در امان بماند.
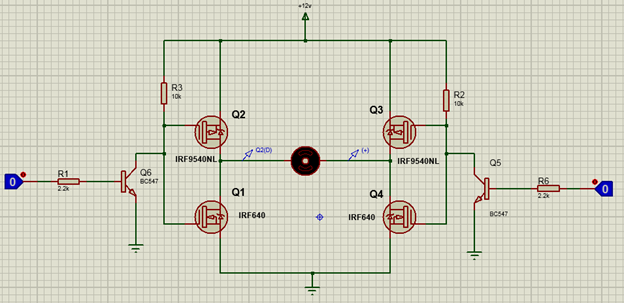
با دادن فرمان صفر منطقی به دو ترانزیستور واسط ما خاموش بوده و به گیت ماسفتها ولتاژ از طریق مقاومت pull up می رسد و طبقه بالایی ماسفتها خاموش و طبقه پایینی روشن هستند.(حالت پیش فرض که موتور در وضعیت خاموش قرار دارد).
در صورت فرمان یک منطقی به دو ترانزیستور واسط ولتاژ گیت ماسفتهای ما صفر می شود زیرا ترانزیستور واسط در صورت روشن شدن گیت ماسفتها را به زمین متصل می نماید.
وقتی ولتاژ گیت ماسفتها صفر می شود , ماسفتهای طبقه پایین خاموش و ماسفتهای طبقه بالا روشن می شوند.و در دو پایه خروجی موتور ما ولتاژ 12 ولت (در عمل کمتر بخاطر افت ولتاژ سوئیچ ها) داریم و از انجایی که در دو پایه موتور ما اختلاف پتانسیل نداریم موتور باز در حالت خاموش قرار می گیرد.
| دو پایه موتور دارای ولتاژ صفر | 0 | 0 | Input 2 | Input 1 |
| دو پایه موتور دارای ولتاژ برابر | 1 | 1 | Input 2 | Input 1 |
| چرخش موتور به چپ یا راست | 1 | 0 | Input 2 | Input 1 |
| چرخش موتور به چپ یا راست | 0 | 1 | Input 2 | Input 1 |
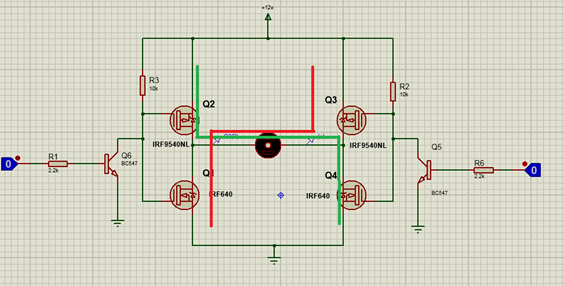
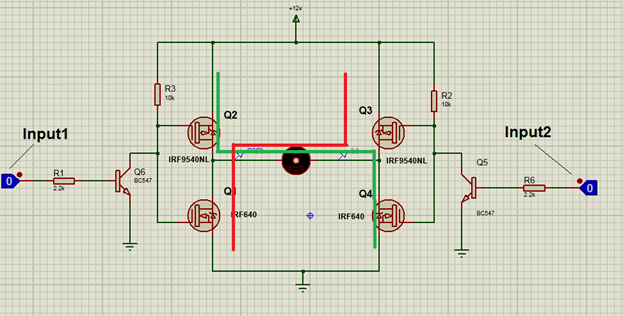
برای چرخش موتور باید دو ماسفت از چهار ماسفت ما در وضعیت خاموش و دو تعداد دیگر در وضعیت روشن قرار بگیرند.
فرض کنیم طبق قراری گیری پایه های موتور اگر مسیر سبز را در پیش بگیریم موتور به چپ می چرخد.برای این منظور ما باید ماسفت Q2 و Q4 را روشن کنیم.
برای رسیدن به این هدف باید Input 1 را در وضعیت یک قرار دهیم (چون ترانزیستور واسط در ارایش امیتر مشترک است و در این ارایش 180 درجه اختلاف فاز داریم یعنی در صورت اعمال ولتاژ به بیس ان خروجی صفر و برعکس با اعمال ولتاژ صفر به بیس ان در خروجی ولتاژ خواهیم داشت) تا ماسفت Q2 روشن شود و همچنین Input2 در وضعیت صفر منطقی قرار بگیرد تا ماسفت Q4 روشن شود.
دو ماسفت طبقه بالایی وظیفه رساندن ولتاژ به یک پایه موتور و دو ماسفت طبقه پایینی وظیفه متصل کردن دیگر پایه موتور به زمین را بر عهده دارند.
بنابراین در حالت روشن ماسفتها در وضعیت ضربدری همیشه یکی از ماسفتهای طبقه بالا ولتاژ را به یک پایه موتور رسانده و یکی از ماسفتهای طبقه پایینی دیگر پایه موتور را به زمین وصل می کنند و فقط این جابجایی سبب تغییر جهت گردش موتور می شود زیرا ولتاژ و اتصال به زمین را به پلاریته های متفاوت موتور اعمال می کنیم.
برای متوقف کردن موتور کافی است ورودیها در وضعیت مشابه صفر یا یک منطقی قرار بگیرند.
تا اینجا در مورد تغییر جهت گردش موتور صحبت کرده ایم.برای کنترل سرعت موتور ما باید ولتاژ رسیده شده به موتور را کم و زیاد کنیم تا بتوانیم سرعت ان را کم و زیاد نماییم.
یکی از روشهای اسان برای این امر استفاده از تکنیک PWM می باشد.
PWM چیست :
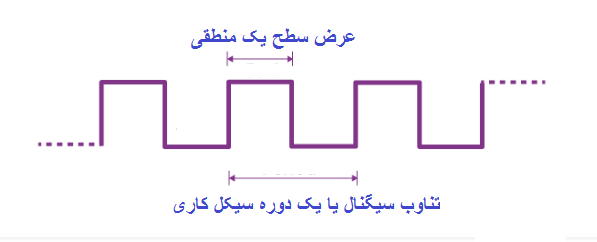
PWMیک پالس مربعی با فرکانس ثابت می باشد که در ان با تغییر نسبت سطح منطقی یک به سطح منطقی صفر (در بازه زمانی یک سیکل کاری) باعث تولید ولتاژ متغییر می شود.
برای مثال اگر فرکانس PWM ما 1 هرتس باشد تناوب ان از تقسیم 1 بر روی فرکانس بدست می اید که در اینجا برابر با یک ثانیه می شود.
T => 1 / F
اگر ولتاژ کاری مدار برابر با 12 ولت باشد و ما 50 % در زمان تناوب سیگنال خود سطح یک منطقی داشته باشیم متوسط ولتاژی که به خروجی تحویل داده می شود برابر با 6 ولت می شود.
و همینطور نسبت به درصدهای مختلف ولتاژ مختلفی به بار تحویل داده می شود.
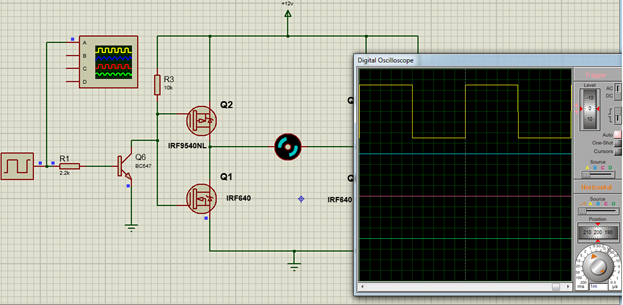
حال اگر در یکی از ورودیهای خود بجای سیگنال مستقیم یک سیگنال PWMاعمال کنیم با تغییرعرض پالس ان می توانیم سرعت موتور را کنترل نماییم.
برای گردش با سرعت دلخواه خود در جهت عکس کافی است مثلا ورودی اول را صفر کرده و ورودی دوم را با سیگنال PWM خود کنترل نماییم.
برای کنترل ورودیها توسط یک سیگنال PWM مشترک می توان از مدار زیر استفاده کرد: